
|
|
Mission:
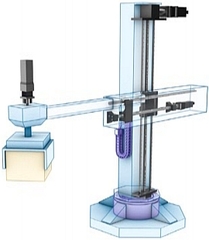
You are a robotics engineering team at Got’em Little Manufacturing Company. At the end of the manufacturing process, the robot picks up the manufactured parts and places them in containers for shipping. Your job is to build and test the automated system. To begin the task, your team must decide how many and what type of sensors the robot will use.
Duties:
Design a robot that, when a pushbutton is pressed, will pick up and place parts using the claw end effector. At one end of its travel, the arm will pick up a manufactured part. At the other end, it will drop the part into a bin, return to the starting point to pick up another part, and so on. Wire the appropriate motors and sensors to the microcontroller.
Write a program that will control the robot. Once the program has been started, the robot will move to the pick-up point. A sensor will signal the robot to stop and pick up the part using the claw. The robot will then move to the opposite end of its travel where it will drop the part in the bin. The robot will repeat this process every time a pushbutton switch is pressed. Open the PLTW Template and Save As PickPlace to your directory. Complete each section: Heading, Task Description, Pseudocode, Motor and Sensors Setup, Program
You are a robotics engineering team at Got’em Little Manufacturing Company. At the end of the manufacturing process, the robot picks up the manufactured parts and places them in containers for shipping. Your job is to build and test the automated system. To begin the task, your team must decide how many and what type of sensors the robot will use.
Duties:
Design a robot that, when a pushbutton is pressed, will pick up and place parts using the claw end effector. At one end of its travel, the arm will pick up a manufactured part. At the other end, it will drop the part into a bin, return to the starting point to pick up another part, and so on. Wire the appropriate motors and sensors to the microcontroller.
Write a program that will control the robot. Once the program has been started, the robot will move to the pick-up point. A sensor will signal the robot to stop and pick up the part using the claw. The robot will then move to the opposite end of its travel where it will drop the part in the bin. The robot will repeat this process every time a pushbutton switch is pressed. Open the PLTW Template and Save As PickPlace to your directory. Complete each section: Heading, Task Description, Pseudocode, Motor and Sensors Setup, Program
